Assistive Dual-UAV System for Human-Guided Cooperative Payload Transportation
Description:
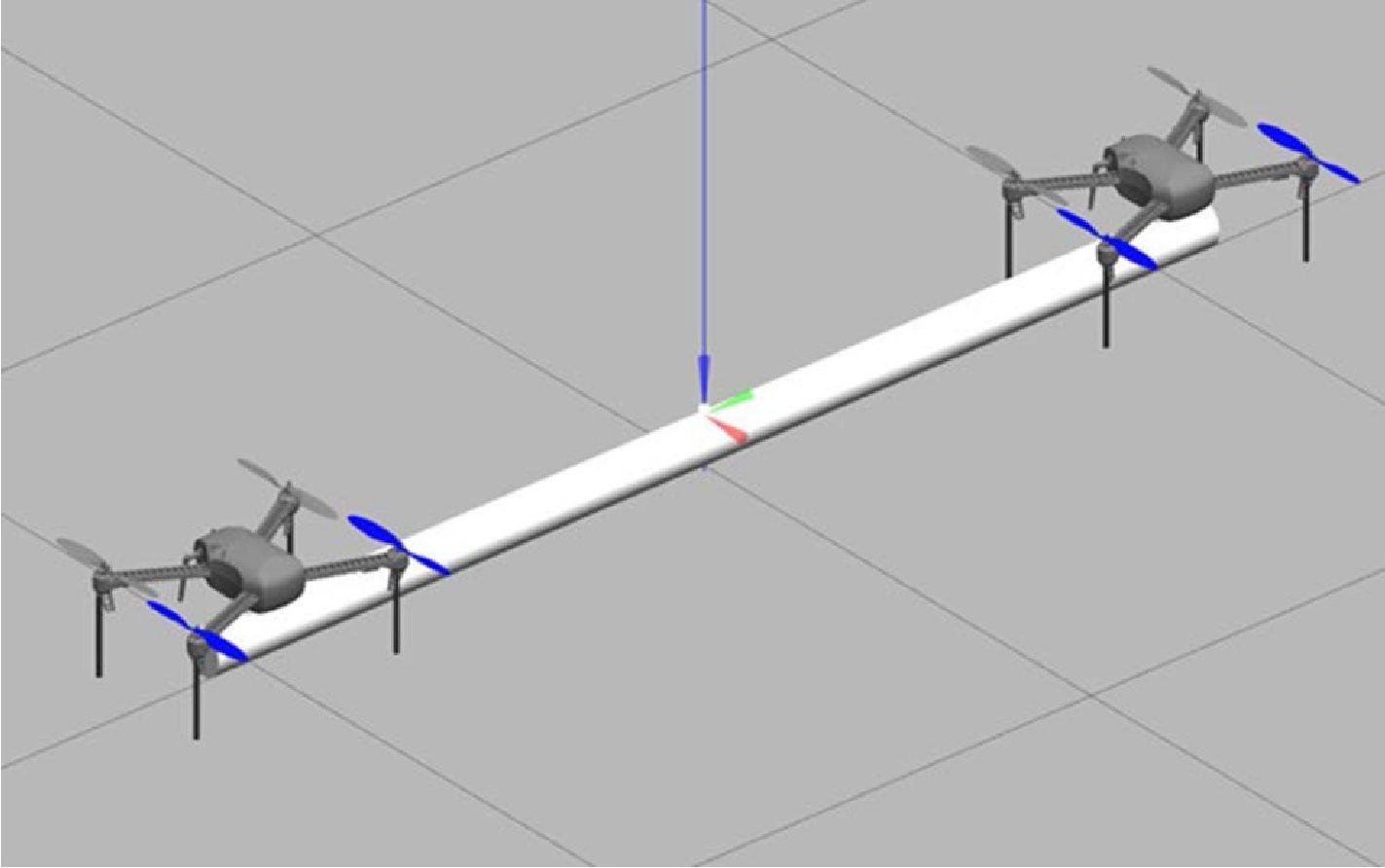
This project presents the development of an assistive aerial system where two quadrotor UAVs collaboratively transport a payload while being directly guided by human physical interaction. The objective is to reduce human effort and enable intuitive cooperation between a user and aerial robots during transportation tasks.
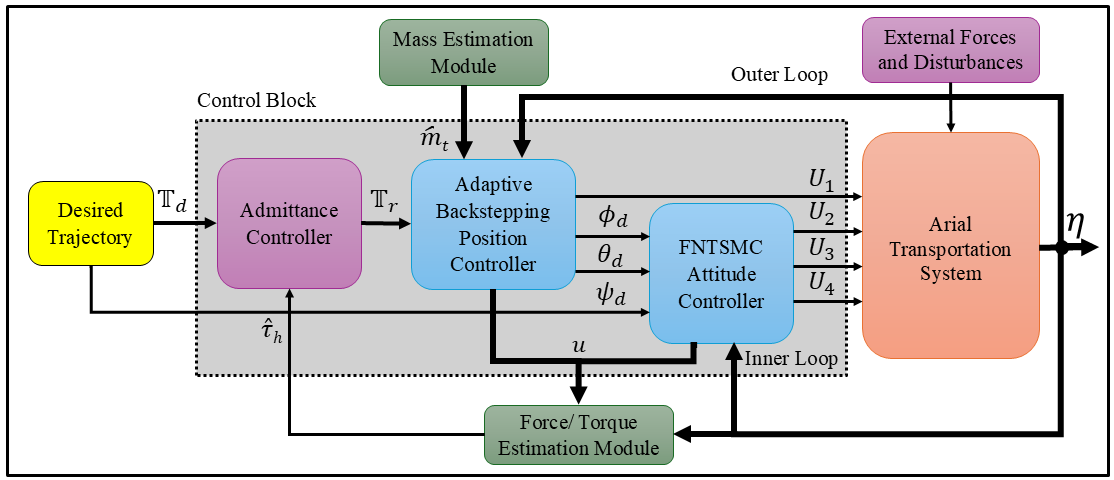
The user applies forces and torques to the payload to indicate the desired motion, which are either measured using force–torque sensors or estimated from the system dynamics to minimize hardware requirements. These inputs are interpreted by the UAVs through an admittance-based interaction framework combined with robust nonlinear control strategies, including sliding mode and backstepping control, to ensure stable and accurate trajectory tracking.
An adaptive robust control scheme was also developed to handle uncertainties in payload parameters and external disturbances. The overall system stability was validated through Lyapunov-based analysis and experimental implementation, demonstrating reliable, human-guided cooperative transportation using multiple UAVs.
 |
 |