Bio-Inspired Robotic Fish with Autonomous Docking and Wireless Charging
Description:
This project focuses on the design and development of two bio-inspired robotic fish prototypes that mimic the propulsion mechanisms of real fish using coordinated pectoral and caudal fins. The goal was to create compact, waterproof, and manufacturable underwater robots while achieving efficient and realistic hydrodynamic performance.
A novel pectoral fin design was introduced and experimentally shown to provide excellent thrust and maneuverability. The robots were mathematically modeled by combining rigid-body dynamics with hydrodynamic effects, where the caudal fin behavior was captured using Lighthill’s elongated-body theory and the pectoral fins using blade element theory. The model was validated through experiments and used for control development and educational demonstrations.
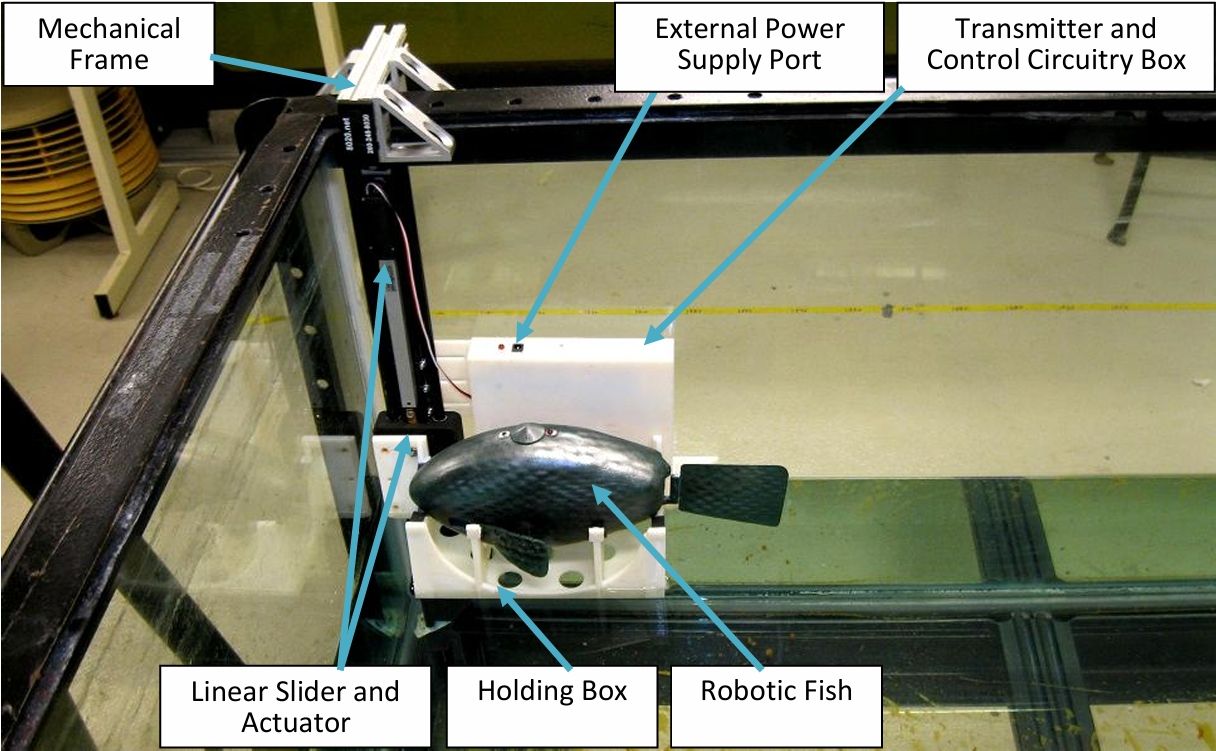
The second prototype was designed for long-term autonomous operation as part of a museum exhibit. For this purpose, a wireless charging system and an automatic docking mechanism were developed. The docking system lifts the robot out of the water for charging and returns it back to the tank without human intervention.
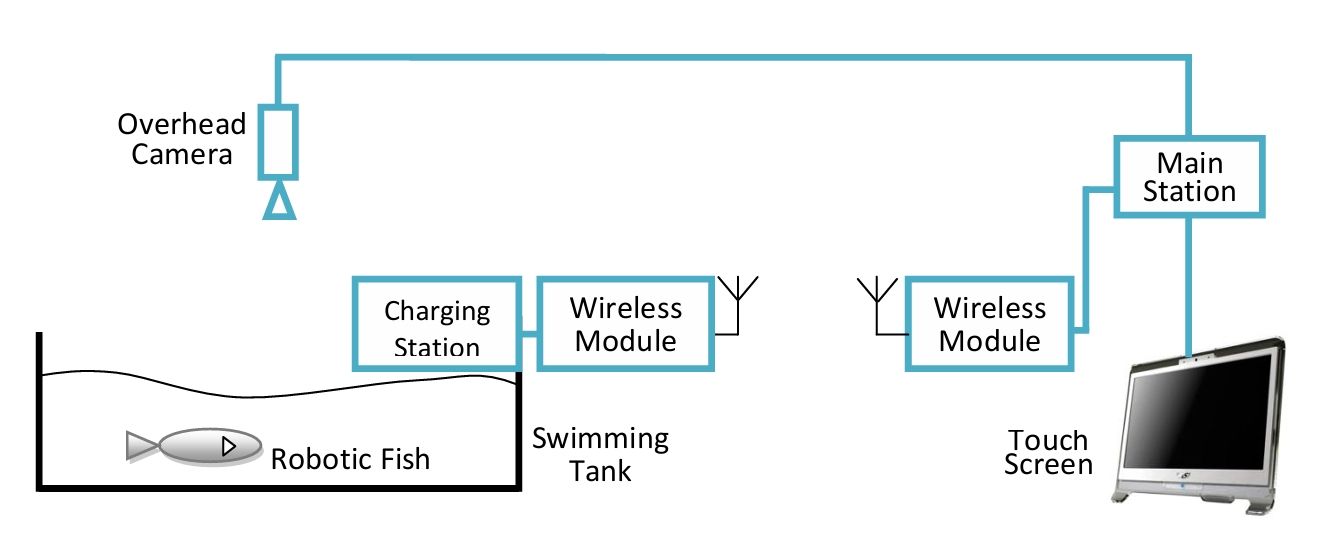
To enable intuitive human–robot interaction, a webcam-based navigation system was also implemented. Users can select a target location within the tank, and the robotic fish autonomously tracks the commanded point in real time.
This project combines bio-inspired design, hydrodynamic modeling, control, autonomous docking, and human–robot interaction into a fully functional underwater robotic platform.
 |
 |
 |
 |
|